- Сведения об образовательной организации
- Основные сведения
- Структура и органы управления образовательной организацией
- Документы
- Образование
- Образовательные стандарты и требования
- Руководство. Педагогический (научно-педагогический) состав
- Материально-техническое обеспечение и оснащенность образовательного процесса
- Стипендии и иные виды материальной поддержки
- Платные образовательные услуги
- Финансово-хозяйственная деятельность
- Вакантные места для приема (перевода)
- Доступная среда
- Международное сотрудничество
Филиал Омского государственного педагогического университета в г.Таре
Адрес:
646535, Омская обл., г. Тара, ул. Школьная, 69.
Помощник директора +7(38171) 2-21-65
Приемная комиссия: +7(38171) 2-20-97
Электронная почта: tfomgpu@mail.ru
На базе Технопарка Филиала ОмГПУ в г. Таре прошло очередное занятие кружка по образовательной робототехнике
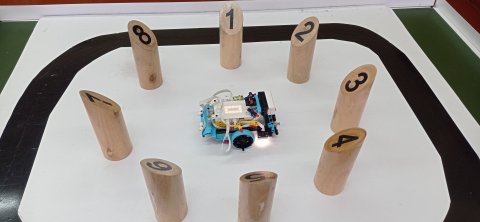
20 декабря 2024 года прошло занятие кружка по образовательной робототехнике «РобоМир», где студенты тестировали роботов для кегельринга на белом поле с черной ограничительной линией и 8 кеглями, используя разные алгоритмы программирования. В кегельринге нужно помнить, что робот должен выталкивать кегли своим туловищем, останавливаться после выталкивания всех кеглей, оставаться в круге и не изменяться в размерах в процессе выталкивания кегель.

Первым рассматривали простейший алгоритм движения в круге до черной линии с одним датчиком цвета. Робот стартует из центра и едет прямо, пока датчик цвета не увидит черную линию поля. Тогда робот отъезжает назад на определенное расстояние, поворачивается направо на 45 градусов и повторяет предыдущие действия. Недостатком данной программы является то, что робот часто не видит черный цвет. Для более точного движения внутри круга нужно заменить черный цвет на отраженный.
Алгоритм «Звезда» предполагает, что робот стартует из центра и едет прямо, пока датчик цвета не увидит отраженный цвет вместо черного. Затем он возвращается в центр и поворачивается направо на угол в 120 градусов. Действия повторяются в цикле 8 раз (по количеству кегель) и образуют звезду.
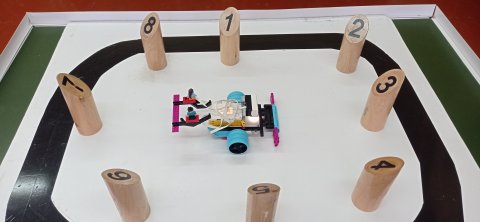
Алгоритм углами позволяет роботу двигаться до черной линии, отъезжать назад, делая поворот таким образом, чтобы при следующем движении робот попал на линию сразу двух кеглей. Если бампер сделан правильно, то можно сразу захватить 2-3 кегли.
Алгоритм с двумя датчиками цвета предполагает использование на роботе двух датчиков цвета: спереди и сзади конструкции. Робот стартует из центра, едет вперед до черной линии, затем назад до черной линии, определяя границы круга разными датчиками. Далее робот выезжает в центр, поворачивается направо на 250 градусов и действия повторяются. Всего предусмотрено 4 повторения.

Последним был рассмотрен алгоритм с датчиком цвета и ультразвуковым датчиком. Для поиска кегель с помощью ультразвукового датчика робот должен вращаться с медленной скоростью, иначе велика вероятность не увидеть кегли. После нахождения кегли робот едет вперед до черной линии, выталкивая кеглю. Возвращается обратно в центр и повторяет предыдущие действия.
Занятие показало, что хороший результат может выдать программа с точным расчетом углов и расстоянием отъезда в центр. Но данная программа очень долго дорабатывается: все цифры, которые представлены, необходимо подбирать под определенного робота, но вначале нужно добиться точности, потом скорости. Стоит отметить, что при изменении скорости, изменятся все рассчитанные углы.
Кафедра математики, информатики и профессионального образования






© 1998—2026 ОмГПУ
Направляйте комментарии по адресу webmaster@omsk.edu